Percobaan 8 Kondisi 4
1. Kondisi [Kembali]
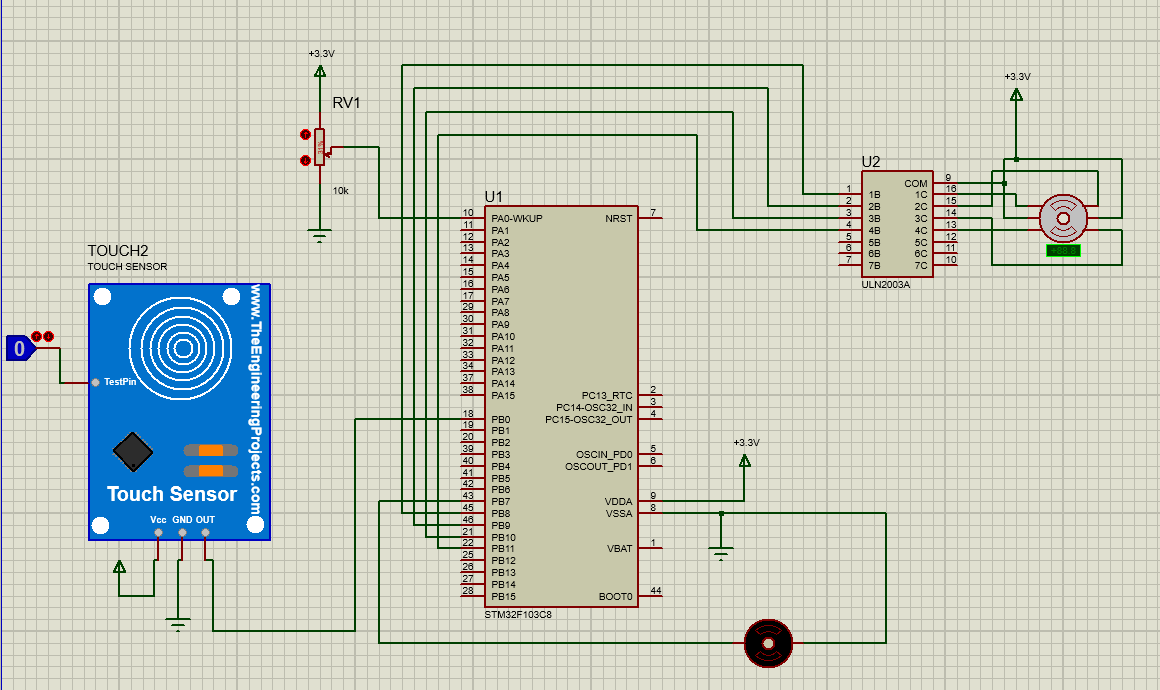
Buatlah rangkaian seperti gambar pada percobaan 8. Jika touch sensor mendeteksi maka motor dc berputar. Jika potensiometer bernilai besar maka motor stepper bergerak berlawanan jarum jam dan jika bernilai rendah maka motor stepper bergerak dengan Oscillate Mode
2. Gambar Rangkaian [Kembali]
3. Video [Kembali]
4. Prinsip Kerja Rangkaian [Kembali]
Rangkaian ini merupakan sistem kontrol motor stepper berbasis mikrokontroler STM32F103C8 yang diaktifkan melalui sensor sentuh (touch sensor). Ketika sensor sentuh diaktifkan, sinyal dari output sensor dikirim ke salah satu pin input mikrokontroler STM32, yang kemudian memproses sinyal tersebut dan mengaktifkan keluaran digital ke driver ULN2003A. Driver ini bertugas mengendalikan arus ke motor stepper (tipe 28BYJ-48), sehingga motor dapat berputar sesuai dengan urutan sinyal yang diberikan oleh mikrokontroler. Tegangan operasi sistem ini adalah 3.3V, dan potensio digunakan untuk pengaturan sinyal reset atau input tertentu ke STM32. Dengan demikian, rangkaian ini memungkinkan pengendalian motor stepper secara sentuhan menggunakan sensor kapasitif.
5. Download File [Kembali]
Download File Rangkaian [Klik]



Komentar
Posting Komentar